The paper Toward Multimodal Image-to-Image Translation (Zhu et al., 2017) faces the problem of multimodal image-to-image translation in a principled way. The same problem is faced in (Isola et al., 2016) (pix2pix) but in a not-so-effective manner (enabling Dropout at inference time).
In this paper, the authors encourage a
bijection between the output and the latent code.
What does it mean?
A bijection is an invertible mapping. If the mapping is invertible it means that given a latent vector and a condition the output is unique. At the same time, given the same condition and a different latent vector, corresponds a different output. In other words the latent code contains information about the output.
The problem: Multimodal Image-to-Image Translation
The problem of image-to-image translation is inherently ambiguous since at a single input image may corresponds many outputs.
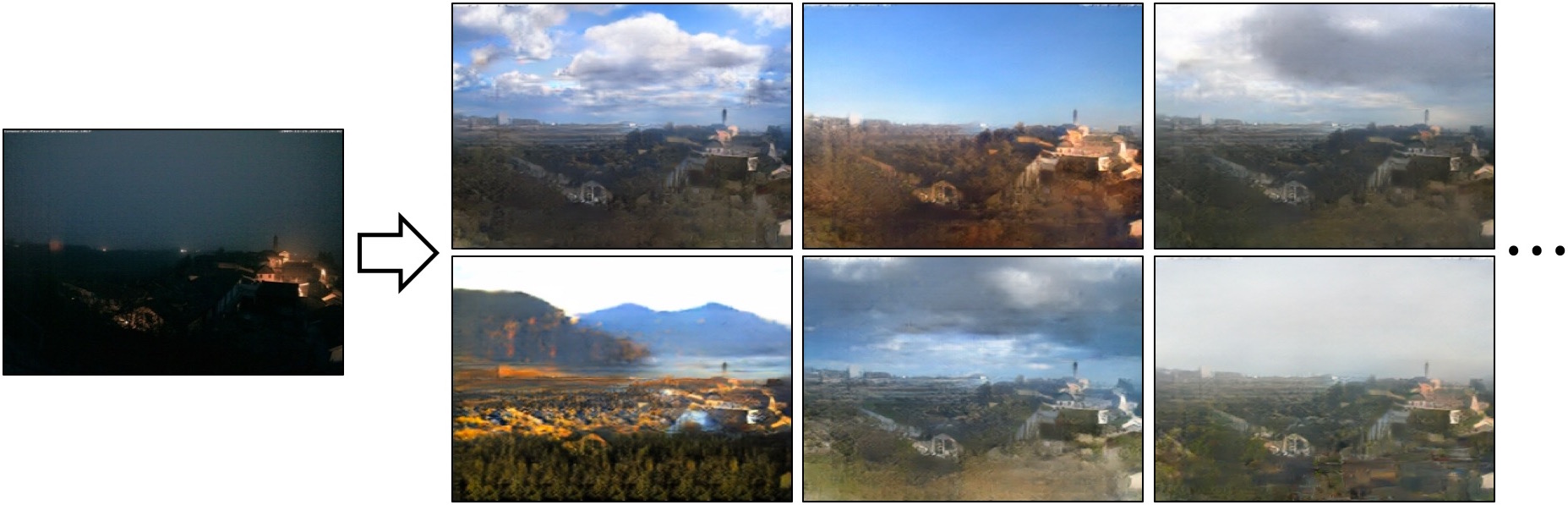
The generator in this context needs to find a mapping from the source domain to a distribution of potential results.
Possibilities and Related Work
In order to encourage a variety of results the pix2pix model uses two different approaches:
-
Concatenate a latent vector to the condition.
-
Enable Dropout at inference time.
The concatenation of latent vector is not very effective in the pix2pix case since it’s ignored by the model.
The Dropout at inference time is not a principled and controllable way to perform multimodal image-to-image translation.
BicycleGAN
The idea, as said before, is to encourage a bijection between output and latent space.
The authors propose different options.
Notation:
- A is the input image (condition)
- B is the target image (real image corresponding to the input A)
- z is the latent vector
- \( \widehat{B} \) is the image generated starting from A and z \( \widehat{B} = G(A, z) \)
- G is the Generator
- E is the Encoder
- D is the Discriminator
cVAE-GAN: Conditional Variational AutoEncoder GAN. First encode B (target image) into latent space through E. The latent distribution is regularized through KL-penalty, enforcing a structure on the latent space and permitting sampling during inference.
cLR-GAN: Conditional Latent Regressor GAN. Feed a random latent vector into G, the encoding of \( G(A, z) \) should resemble the feeded noise z. In other words we require:
\[E(G(A, z)) = \widetilde{z} \approx z .\]BicycleGAN: Combine both cVAE-GAN and cLR-GAN to enforce the connection between the encoding and the output.
Losses
Bicycle GAN combines different losses. Let’s pass through all of them.
Pix2Pix Loss
The Pix2Pix loss combines the adversarial loss and the L1 loss between the generated output and the real output. In math therms:
\[\mathcal{L}_{\text{GAN}}(G, D) = E[\log (D(A, B))] + E[\log (1 - D(A, G(A)))]\] \[\mathcal{L}_{1}(G) = ||B - G(A)||_1\]Using a latent vector this becomes \( G(A, z) \) with z coming from the prior distribution (i.e. \( z \sim p_z \) ).
cVAE-GAN
The cVAE-GAN model uses also the Encoder and enforces the random vector to contain information about the target image.
\[\mathcal{L}_{\text{GAN}}^{\text{VAE}}(G, D, E) = E[\log (D(A, B))] + E[\log (1 - D(A, G(A, E(B))))]\] \[\mathcal{L}_{1}^{\text{VAE}}(G, E) = ||B - G(A, E(B))||_1\]To enable sampling at inference time we need to add a KL penalty:
\[\mathcal{L}_{KL}(E) = KL(\mathcal{N}(0,1), E(B))\]cLR-GAN
We have z coming from the prior distribution, thus we cannot enforce an L1 penalty. This because for an input image we have multiple output image (remember, we are in a multimodal setting). By the way the goal of this part is to recover the latent vector starting from the generated image. In order to do this we add an L1 loss on the latent vectors:
\[\mathcal{L}_{1}^{LR}(G,E)= ||z-E(G(A,z))||_1\]In words, E should be able to replicate the input latent vector.
BicycleGAN
Bicycle GAN combines all the previous losses:
\[\mathcal{L}_{\text{Bi}} = \mathcal{L}_{\text{GAN}}^{\text{VAE}} + \lambda_1 \mathcal{L}_{1}^{\text{VAE}} + \mathcal{L}_{\text{GAN}} + \lambda_{LR} \mathcal{L}_{1}^{LR} + \lambda_{KL} \mathcal{L}_{KL}\]How to feed noise inside G?
The authors explored two ways of injecting the latent vector z to in the generator:
- add_to_input: spatially replicate a Z-dimensional latent vector z to an H × W × Z tensor and concatenate it with the H × W × 3 input image
- add_to_all: we add z to each intermediate layer of the network G, after spatial replication to the appropriate sizes
Details
- The generator is a UNET model
- The \( \mathcal{L}_{\text{GAN}} \) loss is actually a Least Square GAN loss (Mao et al., 2016)
- Not conditioning the discriminator D on input A leads to better results
- Hyperparameters: \( \lambda = 10 \), \( \lambda_{LR} = 0.5 \) and \( \lambda_{KL} = 0.01 \)
- Train using Adam with a batch size of 1 and with a learning rate of 0.0002
-
latent dimension \( z = 8\) across all the datasets
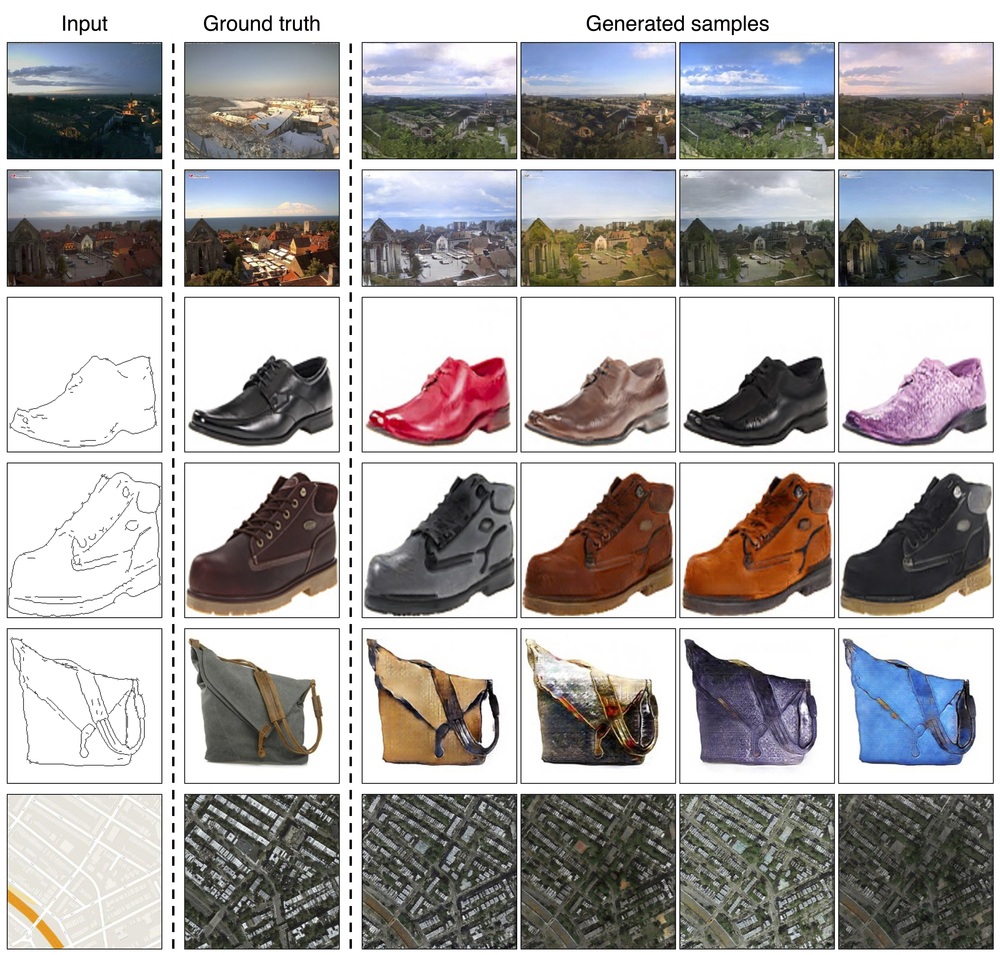
Results
References
- [zhu_toward_2017] Zhu, J.-Y., Zhang, R., Pathak, D., Darrell, T., Efros, A. A., Wang, O., & Shechtman, E. (2017). Toward Multimodal Image-to-Image Translation. ArXiv:1711.11586 [Cs, Stat]. http://arxiv.org/abs/1711.11586
- [isola_image--image_2016] Isola, P., Zhu, J.-Y., Zhou, T., & Efros, A. A. (2016). Image-to-Image Translation with Conditional Adversarial Networks. ArXiv:1611.07004 [Cs]. http://arxiv.org/abs/1611.07004
- [leastsquaregan] Mao, X., Li, Q., Xie, H., Lau, R. Y. K., & Wang, Z. (2016). Multi-class Generative Adversarial Networks with the L2 Loss Function. CoRR, abs/1611.04076. http://arxiv.org/abs/1611.04076